A new Robotic DIMM for Calar Alto Observatory
Jesús Aceituno
Astronomy group. Calar Alto
Description of the system
Since July 2004, Calar Alto is operating a new Robotic seeing monitor.
Its philosophy is very similar to the comercial seeing monitor from LHESA,
which is in use on Calar Alto since June 2000. The new RoboDIMM
has, however, a significantly improved mode of operation, thanks to
experience gathered at the IAA(CSIC) and on Calar Alto. The optical setup
for the new RoboDIMM is identical to that of the LHESA DIMM
(Vernin & Muńoz-Tuńón, 1995).
Mainly, the system consits of a C8 Schmidt-Cassegrain equipped at its
entrance pupil with a mask with two 60 mm subapertures separated by 140mm
and a wedge prism (30" deviation angle) placed on one of them, producing a
twin image of the same star. The total focal length of the system is
enlarged until 3.0m with a single eyepiece to macth the pixel size.

Figure 1: Entrance aperture of the C8.
The german equatorial mount is a CGE800 from CELESTRON. The first tests
done at Calar Alto have shown excelent pointing and guiding capabilities
for this mount. Because of that, the system is able to slew automatically
between stars from an internal database depending of external conditions
like inadequate airmass or clouds presence, making this one of the main
differences with the LESHA DIMM. The total time inverted on this is not
longer than 60sec in the worst case. After three tries to find a star in
three different sky positions the software warns about the possibility
of clouds.
To achieve a good automated performance, the system has been equipped with
two cameras. The twin image of the same star produced by the subapertures
is captured at its focal plane by a high sensitivity black and white
video camera. The main advantage of this camera, apart from its high
sensitivity to low light conditions and low cost, is the posibility to set
the integration time as short as 1 millisec, minimizing that possible
errors could affect longitudinal and perpendicular seeing values. An external
low light CCD video camera attached to the side of the telescope tube
is connected to a 75 mm wide field objetive providing 2 degrees of field of
view, making a good pointing accuracy of the telescope possible even if the
mount is not well polar-aligned.
Through the use of a video frame grabber car, the PC computes the variance
of the differential motion of the two images of the star in two directions,
perpendicular and parallel respect to apertures, giving two independent
values for r0, and consequently two values for the classical
astronomical seeing fwhm=0.98lambda/r0 (Dierickx 1992). In principle, both
estimates should give the same value. To record both values it is useful to
improve the statistics and also to be sure, no temporal smoothing is
affecting the measurements, moreover it's a good way to know that the system
is working under reasonable conditions of applicability of the differential
principle.
Seeing values are referred to zenith taking into account the airmass
correction, and using a small zenithal angle smaller than 30ş. Standard
deviation of the wavefront tilt differences in both directions is calculated
on 300 such short exposures. This corresponds to a seeing stimation every
20 seconds aproximately.
The advantages for this method are that problems arising from telescope
like bad tracking, wind shaking or wrong focus are cancelled out. In the
special case of strong wind gust (Martin 1987), longitudinal and
perpendicular values may be affected by errors producing differences in
the results obtained. For that reason, the exposure time for the new
Calar Alto DIMM is set to 2 milliseconds.

Figure 2: Detail how the new RoboDIMM looks like.
The software.
The software is very user-friendly and it is written in C++ in a multi
threaded environment. Two displays show the camera images and the plots
with the longitudinal and perpendicular seeing values obtained. It contains
automatic routines for gain control, twin star calibration, telescope
control, alignment cameras procedures, pixel scale determination, remote
focus, two different star's search algorithms, two different centroid's
determination algorithms. A full remote control of the system can be
carried out by this software, even hardware reboot facilities. The
possibility of a complete manual mode operation is also avaible.
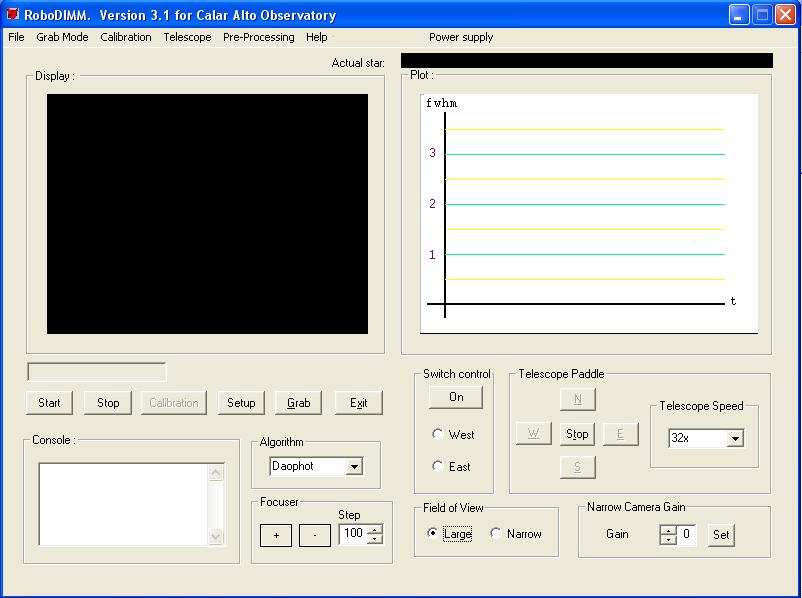
Figure 3: User-friendly graphic user interface.
The telescope console offers the possibility to select the star in a database
or enter coordinates in case the desired position does not exist in the list.
There are avaible two algorithms to make easier an apropiate star search, a
best hour angle for the sidereal time, and closest to zenith. The algorithms
select the three best candidates and choose the brightest one.
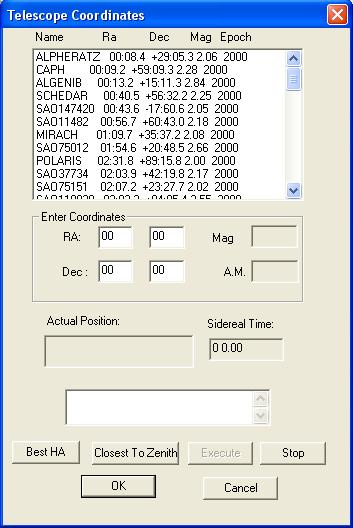
Figure 4: Telescope console. A full star list covers the whole sky all the year.
The automatic gain control assures no saturation affects the measurements
even when changes in transparency or dew condensation occur. When high
humidity (>80%) the wedge prism is condesated producing a sharp decrease of
the luminosity in one of the twin images. If the camera gain is increased
to see that image, probably the other one is saturated inducing an error in
the measurements. To avoid this, the automatic gain control was included.
In the next plot, the differences can be observed in the measurements
for two nights whith condensation on the wedge prism, with and without the
gain control . On the other hand, if the telescope slews to a very bright
star, it should be able to regulate the gain automatically.
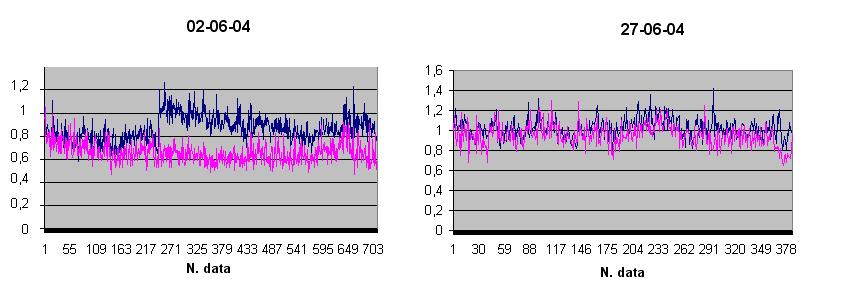
Figure 5: Left) Effect of dew condensed on the prism
and no gain control. Right) Effect of dew condensed on the prism and gain
control.
In the future, we are going to map the seeing over the full Calar Alto site,
and we will fully characterise the total degradations of the seeing
measurements with the DIMM placed on the telescope floor.
References
- Vernin, Jean; Munoz-Tunon, Casiana, Astronomical Society of the Pacific, Publications (ISSN 0004-6280), vol. 107, no. 709, p. 265-272. 1995
- Dierickx P. Optical Performance of large ground-based telescopes; J. Mod. Opt. 39, 569. 1992.
- Martin, H. M. PASP,99 1360. 1987.
- Sarazin, M.; Roddier, F.,Astronomy and Astrophysics (ISSN 0004-6361), vol. 227, no. 1, Jan. 1990, p. 294-300.